Mechanika tuhého tělesa
Tuhé těleso
- ideální těleso
- skupina hmotných bodů, jejichž vzájemná vzdálenost se nemění
- ve skutečnosti neexistuje
- nemění tvar ani objem působením libovolných sil
- ve skutečnosti neexistuje
- použití v případech
- kdy lze deformační účinky sil zanedbat
- nelze těleso nahradit hmotným bodem
Síly
- působiště síly lze v tělese libovolně posouvat po vektorové přímce síly
- sčítání sil
- síly se stejným působištěm
- rovnoběžné se jednoduše sečtou
- u různoběžných se doplní rovnoběžník a výslednicí je úhlopříčka
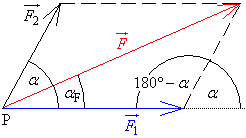 { height=150 }
{ height=150 }- pro výpočet použijeme součet dvou vektorů, v případě kolmých sil můžeme i goniometrické funkce
- síly s odlišným působištěm
- různoběžné
- síly posuneme na stejné působiště
- rovnoběžné
- síly si musíme "zrůznoběžnit" a pak sečteme jako dvě různoběžné se různým působištěm, výslednici nakonec přesuneme do roviny s původními silami
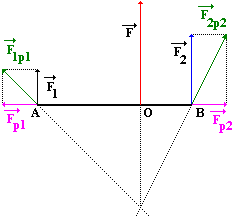 { height=150 }
{ height=150 }- výpočtem lze působiště síly najít nepřímou úměrou
- lze také použít trik - jednu ze sil otočíme do protisměru (vynásobíme vektor ), spojíme konce sil přímkou a tam kde tato přímka protíná přímku mezi působišti obou sil, tam působí výsledná síla
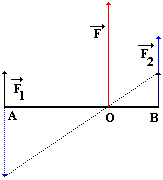 { height=150 }
{ height=150 }
- různoběžné
- dají se stejně tak rozkládat, jen opačně než sčítání
- nelze sčítat síly mimoběžné
- síly se stejným působištěm
- těžistě tělesa
- působiště tíhové síly působící na těleso v homogenním tíhovém poli
- v pravidelných tělesech (koule, krychle) tvořených homogenní hmotou se nachází v geometrickém středu tělesa
- můžeme ho zjistit zavěšením tělesa
- nachází se v průsečíku všech těžnic - přímek vedoucích z bodu zavěšení kolmo dolů skrz těžiště
Poloha tělesa
- lze definovat pomocí 3 bodů na nebo v tělese, které neleží v přímce
- v případě 3 rozměrného prostoru 9 různých souřadnic, z nichž je potřeba pouze 6 (zbylé se dají dopočítat pomocí trojúhelníků)
- rovnovážná poloha nastane, když součet všech sil působících na těleso je nulový zároveň s výsledným momentem sil (viz dále)
- stálá (stabilní) rovnovážná poloha je takové poloha, do které se těleso po vychýlení vrácí
- například kulička v důlku
 { height=60 }
{ height=60 }
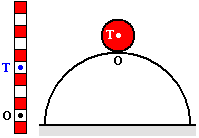
- vratká (labilní) rovnovážná poloha je taková poloha, do které se těleso po vychýlení nevrací
- například kulička na kopečku či tyč stojící na špičce
 { height=60 }
{ height=60 }
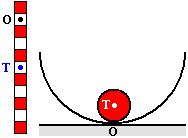
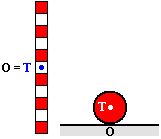
- volná (indiferentní) rovnovážná poloha je taková poloha, u které se vychýlením nezmění výsledná síla ani moment a těleso zůstává v konstantní vzdálenosti od původní polohy
- například koule na vodorovném podkladu
 { height=60 }
{ height=60 }
- stálá (stabilní) rovnovážná poloha je takové poloha, do které se těleso po vychýlení vrácí
Pohyb tělesa
- lze rozdělit na 2 typy, výsledný pohyb vzniká složením obou
- posuvný pohyb (translace)
- všechny body tělesa konají pohyb po stejných, jen vůči sobě posunutých trajektoriích
- rychlost všech bodů tělesa je stejná
- lze převést na pohyb hmotného bodu (nejčastěji těžiště)
- kinetická energie tělesa je
- stejné jako u hmotného bodu
- energie, kterou je potřeba vynaložit na uvedení tělesa do pohybu z klidového stavu
- otáčivý pohyb (rotace)
- všechny body tělesa konají pohyb po kruhových trajektoriích, jejichž středem je osa rotace
- rychlost otáčení definujeme jako úhlovou rychlost
- změna úhlu (v radiánech) za čas
- rychlost otáčejícího se bodu tělesa lomená vzdáleností od osy otáčení
- je vůči jedné ose otáčení u všech bodů stejná
- energie rotujícího tělesa je dána součtem kinetických energií všech bodů
- lze vypočítat z úhlové rychlosti a momentu setrvačnosti (viz moment setrvačnosti)
- k posouzení účinku síly na otáčivý pohyb se používá moment síly
- k posouzení energie potřebné na roztočení tělesa se používá moment setrvačnosti
Moment síly
- používá se k posouzení otáčivých účinků síly na těleso
- vektorová fyzikální veličina
- symbol
- odvozená jednotka newton metr
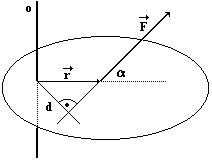
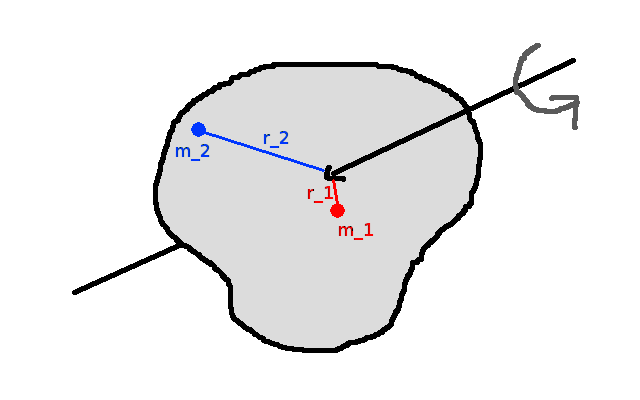
- výpočet
- je vektor kolmý na osu otáčení, vede z ní až do působiště síly
- směr vektoru lze určit podle pravidla pravé ruky
- je vektor síly působící na tuhé těleso
 {height=100}
{height=100}
- je vektor kolmý na osu otáčení, vede z ní až do působiště síly
- je kolmá vzdálenost od osy otáčení k vektoru síly (viz obrázek výše)
- je úhel mezi vektorem a
- momentová věta
- momenty jednotlivých sil vektorově sčítáme, abychom zjistili celkové rotační účinky na těleso
- pokud je výsledný moment nulový, rotační účinky nejsou žádné
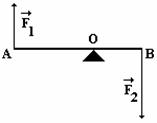
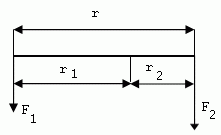
- příkladem využítí je dvouzvratná páka
 {height=80}
{height=80}
- dvojice sil
- současné působení dvou rovnoběžných sil stejně velkých opačného směru působících v různých místech (na různých vektorových přímkách) tuhého tělesa
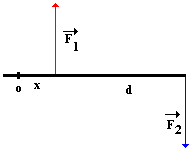 { height=100 }
{ height=100 }- translační účinky obou sil se vyruší, takže těleso se nikam nepohybuje
- rotační účinky ale nemůžeme zanedbat
- u obou sil proto musíme spočítat jejich moment
- pomocí momentové věty určíme celkové rotační účinky na těleso
- rameno dvojice sil je vzdálenost mezi silami ()
- velikost výsledného momentu je , kde
Moment setrvačnosti
- vyjadřuje míru setrvačnosti při rotačním pohybu
- závisí na rozložení hmoty v tělese a na umístění osy otáčení
 { height=150 }
{ height=150 }- každý hmotný bod tělesa má vliv na moment setrvačnosti
- čím dále je bod dále od osy otáčení, tím více přispívá k momentu setrvačnosti
- roztočit dlouhý válec je náročnější než kouli o stejné hmotnosti
- symbol , někdy také
- odvozená jednotka
- využití
- kinetická energie rotace
- energie potřebná k roztočení tělesa z klidového stavu na určitou úhlovou rychlost ()
- kinetická energie rotace
\pagebreak
Příklady
Moment síly
Zadání
Ve vrcholech obdélníkové desky (rovnoběžník ) se stranami , působí síly , , , . Deska je otáčivá kolem osy, která je kolmá na desku a prochází vrcholem . Jaký je výsledný moment sil působících na plotnu?
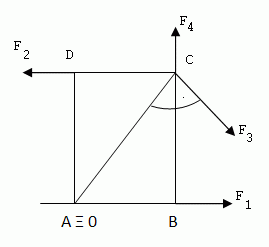 \
\
Řešení
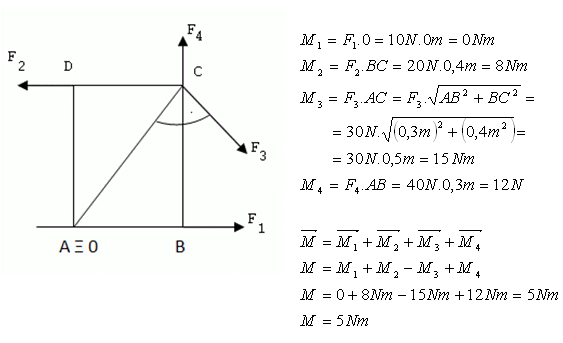 \
\
Výsledný moment sil je .
Skládání sil
Zadání
Tyč má délku . Na její koncích jsou zavěšeny závaží s hmotnostmi a . Kde je třeba tyč podepřít, aby zůstala v rovnováze?
 \
\
Řešení
Na řešení použijeme momentovou větu. Protože na tyč nemají působit žádné rotační účinky, musí být celkový moment nulový.
, , , ,
Tyč je třeba podepřít ve vzdálenosti metru od síly .